Overview
FTC robotics is my favorite STEM activity because it blends creativity, engineering, and teamwork into one high‑pressure challenge. During the 2025–26 DECODE season, I focus on software for Team Blu Cru 6417, developing driver‑control and autonomous pathing code for our highly sensor‑driven robot, including a custom pure‑pursuit path‑planning algorithm for precise navigation. Our robot's performance helped Blu Cru win the 1st place Inspire Award at the Chesapeake Regional Championship, and ultimately win the 1st place Inspire Award (Goodall Division) at the 2026 FIRST World Championship — placing in the top ~0.1% of teams globally.
Awards & Achievements
- 1st Place Inspire Award (Goodall Division) – 2026 FIRST World Championship — top ~0.1% of teams globally
- 1st Place Inspire Award – Chesapeake Regional Championship (280+ teams)
My Role
My role on Team Blu Cru 6417 is to focus on the software side of the robot, making sure our many sensors work together reliably and the robot responds predictably during matches. I help develop and tune our autonomous routines, including creating a custom pure‑pursuit path‑planning system, and mentor newer programmers on debugging and clean code practices.
Technology Stack
What I Learned
During the 2025–26 season, I learned how important it is to start with deep game analysis and tradeoff studies so my team's design ideas are driven by strategy, not just what looks cool. I also saw how a clear software architecture (clean modules, well‑defined interfaces, and readable code) makes it much easier to maintain and evolve a complex robot over the season. Finally, I built a solid understanding of the pure pursuit algorithm and how it uses waypoints and a moving “look‑ahead” point to generate smooth autonomous paths on the FTC field.
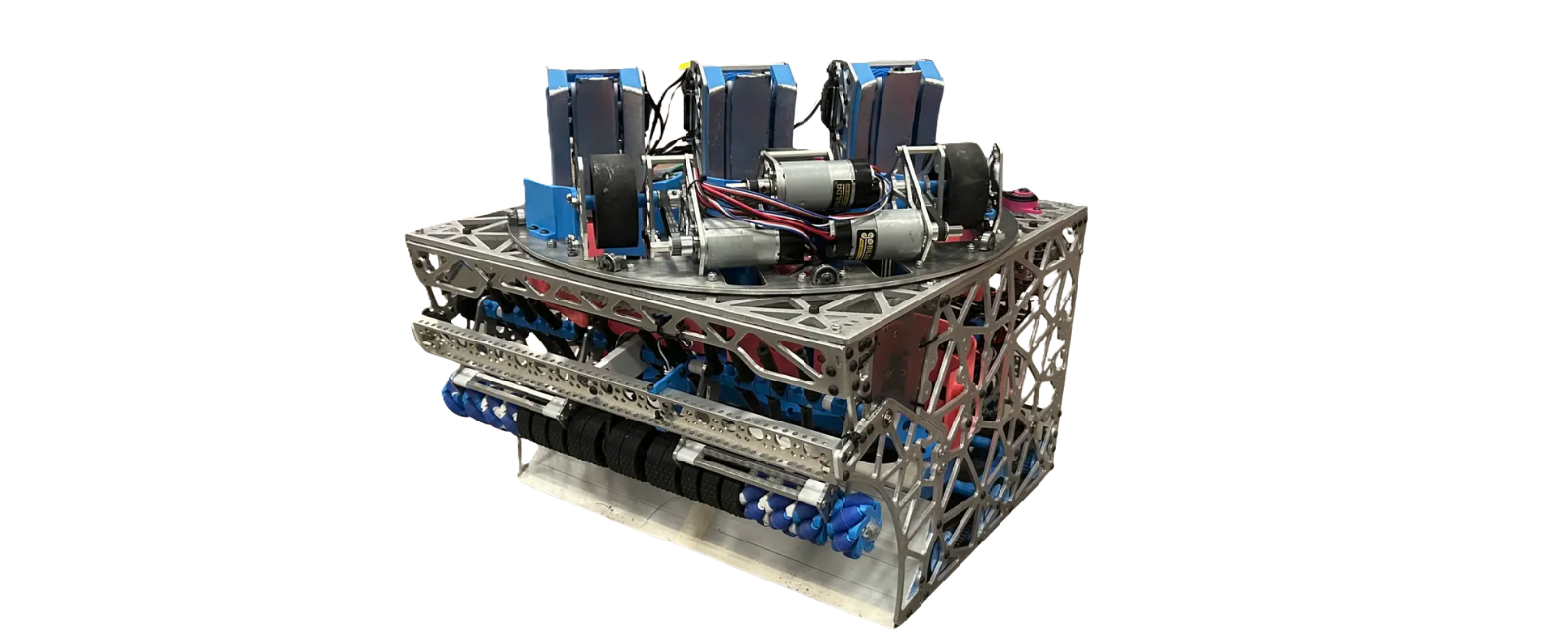
Photos