Overview
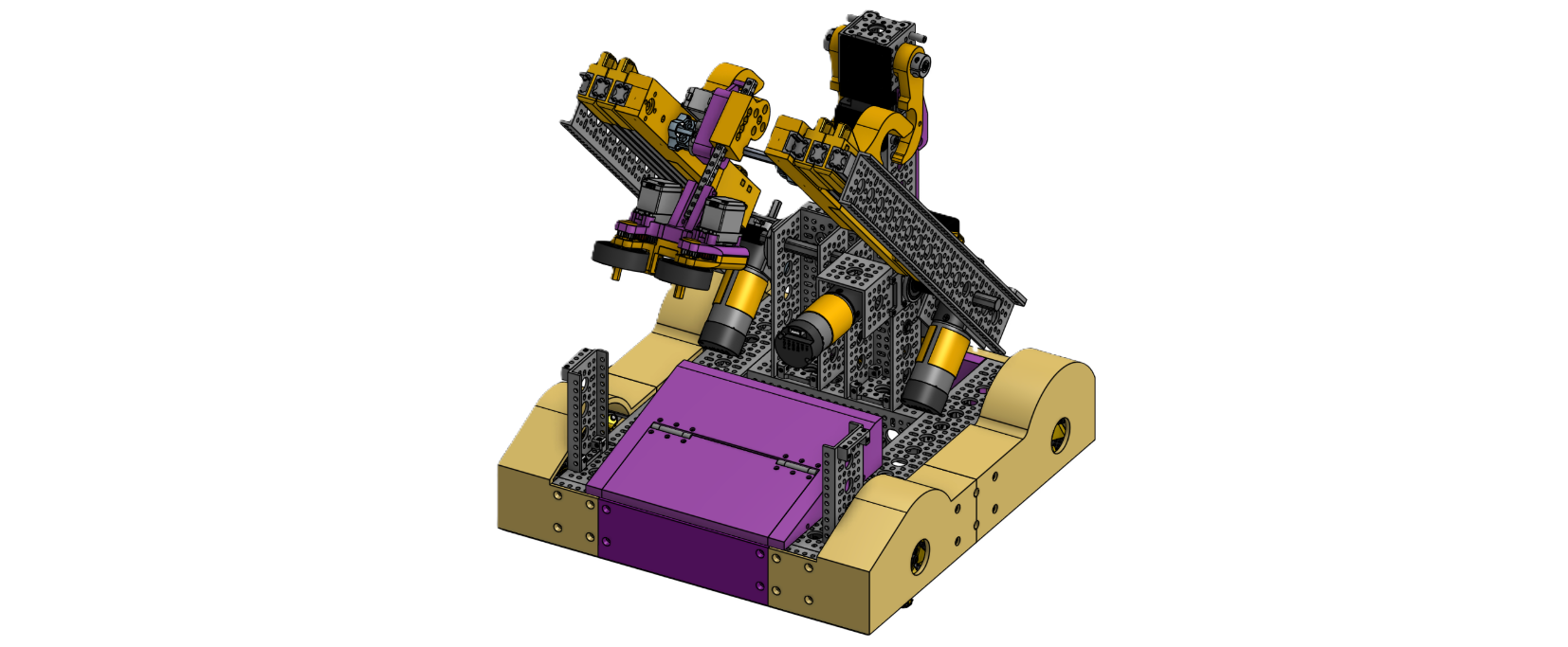
During the INTO THE DEEP season, I was a member of FTC Team FeNiX.exe 25865, a student-run team focused on building a high-performing robot while growing our technical skills and doing meaningful outreach in our community. We set goals for every member to learn CAD, coding, and outreach, and used an engineering design process, strategy matrices, and Kanban task tracking to iteratively improve our robot and season plan. Our robot, Zapdos, ultimately combined advanced hardware like custom Misumi slides and an active intake with modular, Java-based software and high-scoring autonomous routines.
Awards & Achievements
- 1st Place Inspire Award – Chesapeake Regional Championship (250+ teams)
- Qualified for FIRST Championship 2025 in Houston, TX (1st of 5 advancing teams)
Team Portfolio
📄 Download Full Portfolio (PDF)My Role
My primary role on FeNiX.exe was TeleOp software lead, focusing on drivetrain control and the drivers' in‑match experience while also contributing to CAD and hardware decisions. I led the design of a modular software architecture with clear subsystems and finite state machines, added driver automations so complex scoring sequences could be triggered with single‑button presses, and sped up our loop cycles by reducing I2C reads, using bulk reads, and trimming unnecessary telemetry. I also worked closely with the hardware team on the drivetrain and arm, tested new mechanisms on the field, and supported outreach by explaining our robot and software to visitors, judges, and younger teams.
Technology Stack
What I Learned
From this season, I learned how powerful frequent iteration is when hardware, software, and strategy all evolve together, and how tools like Kanban boards and issue logs keep a complex project on track. On the technical side, I deepened my understanding of modular software design, Java interfaces, and finite state machines, and saw how code structure directly affects driver performance and reliability on the field. I also learned that clear communication, through documentation, code reviews, and explaining design trade-offs to teammates and judges, is just as important as building a fast robot.
Photos